Figure 1 shows the overall architecture of this RTOS. The most important thing to notice
how interrupts get enabled and disabled through out. Kernel tasks are protected from interruption
by hardware interrupts before entering the kernel by disabling the interrupt. Also, when
kernel tasks return they enable interrupts so that user tasks can be pre-empted, interrupted and
RTOS tick can take place. Also, notice the event architecture. Only one task can wait for an event.
In the previous implementations each event cell was a queue so that many tasks can wait for the same
event.
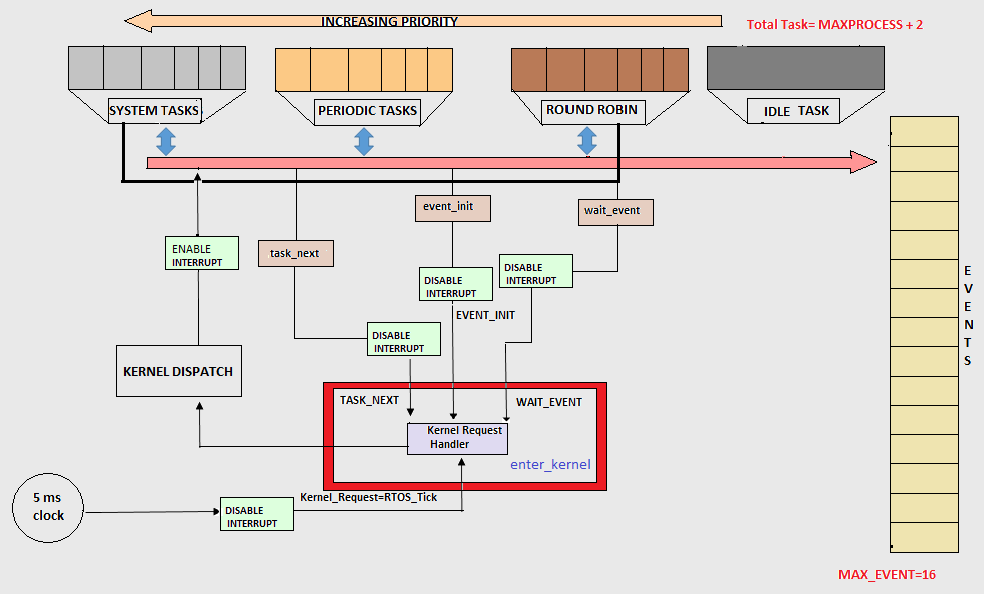 Figure 1:
Figure 1: Overall architecture of the RTOS.
Differences in API with previous RTOSes of this class
The primary differences are:
- Only one task can wait for an event.
- No Periodic Process Plan.
- No Task_Sleep.
We think the first improves
predictability in RTOS scheduling. It is uncertain
which task gets the CPU when multiple tasks with varying priorities wait for the same event.
The second has some benefits as well some drawbacks. The most prominent drawback we see that with
the current method we cannot schedule a periodic task that has sub-phases. Sub-phases
can be helpful when a number of tasks exceeds the maximum allowed tasks. In that case, two
unrelated tasks can be merged into one periodic task with sub-phases. However, the current
method has many advantages as well. An application engineer can specify the start time. This
was not possible previously. With this one can wait for initialization before starting
a periodic task. The third item, that is, the lack of
Task_Sleep may be a problem.
For an under-utilized CPU, RR tasks -- which we assume need only infrequent CPU are scheduled
most of the time (e.g. 98% of the time for our Sentry Robot). This is not exactly a problem
for a system that does not care about conserving power. However, for systems that want to
conserve power as much as possible it is probably advisable to put the CPU to sleep during the
idle time. For RR tasks that do not wait for events this may not be possible without
Task_Sleep.