Context Switch
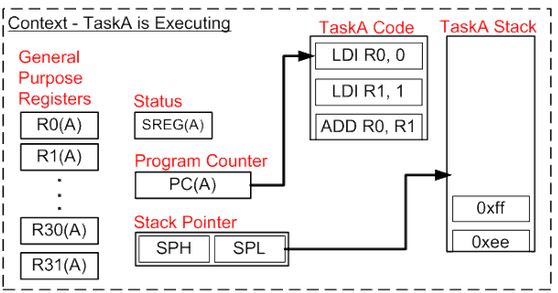
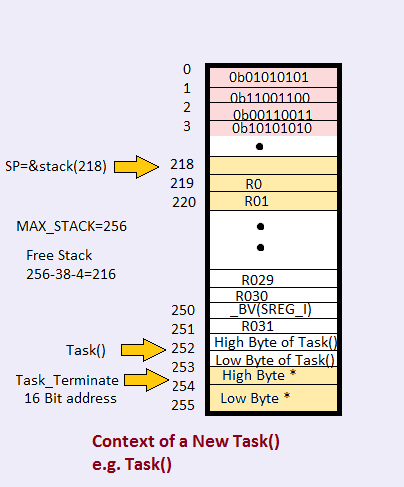
In this page we will describe the data that constitute the context of a task in an 8 bit AVR ATmel
MCU. We will then
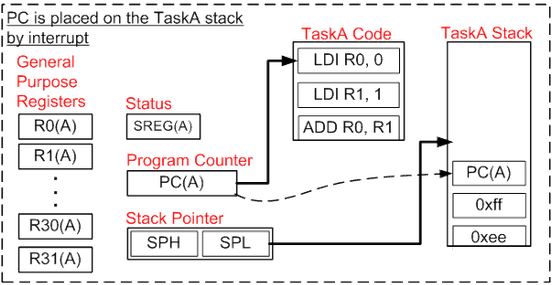
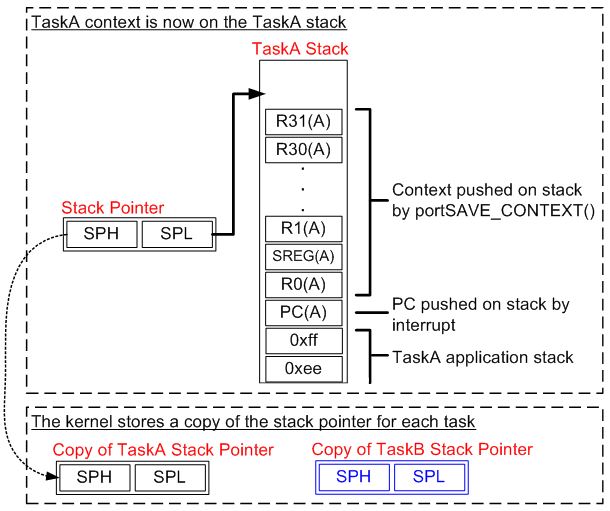
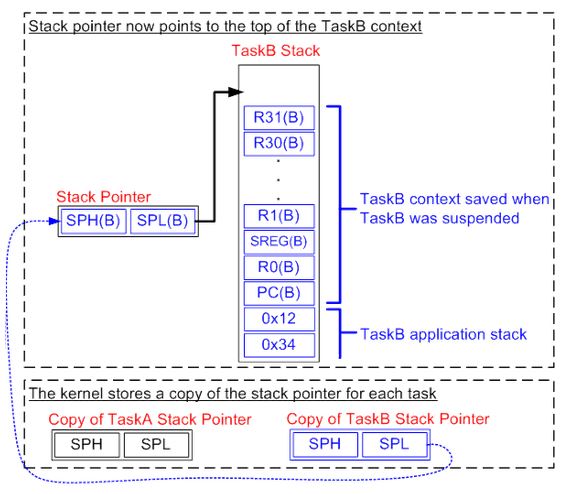
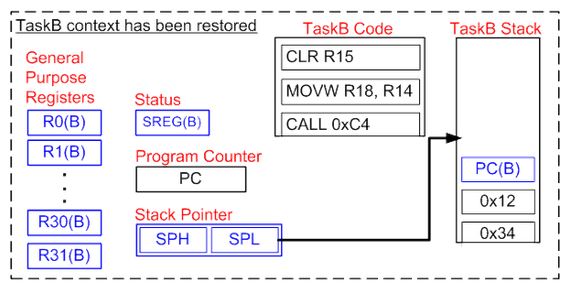
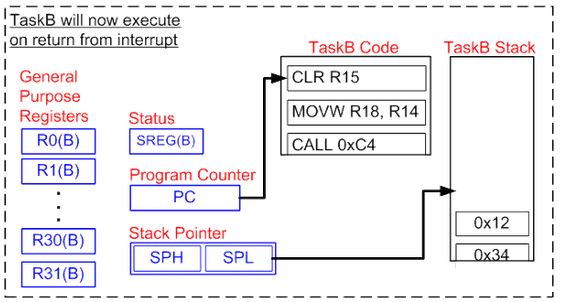
show how the kernel switches the contexts of tasks to provide concurrency.
In general, the scheduler maintains a queue of tasks for each priority level (e.g., System, Periodic, RR). Based on some scheduling policies (fixed or dynamic) the scheduler may decide to suspend a task and resume another task, that is, switch contexts to run a different task. In this RTOS, a context switch occurs in the following cases:
In general, the scheduler maintains a queue of tasks for each priority level (e.g., System, Periodic, RR). Based on some scheduling policies (fixed or dynamic) the scheduler may decide to suspend a task and resume another task, that is, switch contexts to run a different task. In this RTOS, a context switch occurs in the following cases:
- an RR task pre-empts the idle task,
- an RR task finishes its quantum (allotted time of execution),
- a scheduled Periodic task pre-empts an RR or the idle task,
- a Periodic task voluntarily relinquishes the CPU,
- a System task becomes ready and pre-empts a running non-system task (e.g., Periodic, RR, idle)
- an RTOS tick occurs, and
- a hardware interrupt pre-empts a running task.